Tutorial on MRI-Guided Robot-Assisted Prostate Biopsy
SmartTemplate Robot
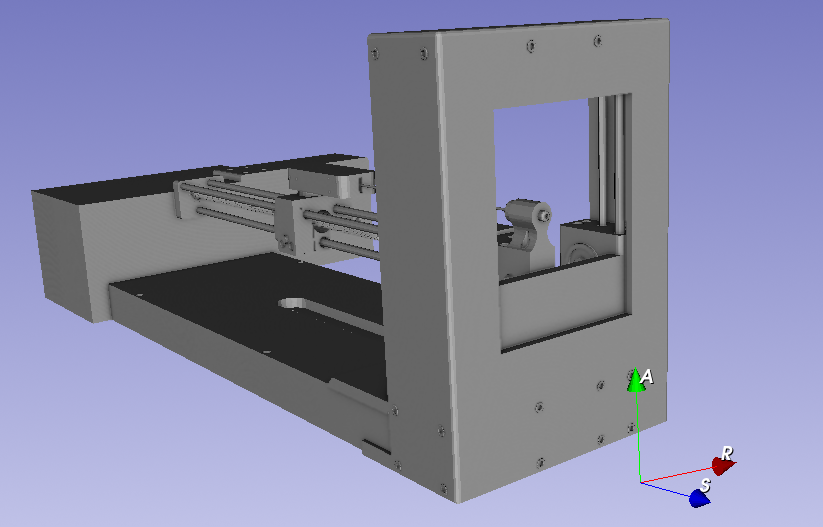
The SmartTemplate robot is a 3 degrees-of-freedom (3-DOF) prismatic robot designed to align a needle guide in 3D space for MRI-guided interventions. It consists of three translational joints that move along orthogonal axes. The robot was designed based on the 2DoF Motorized Template [1,2] and extended to 3-DoF in a recent study [3].
Kinematic Chain
world
└── base_joint (fixed)
└── base_link
└── vertical_joint (Z-axis)
└── vertical_link
└── horizontal_joint (X-axis)
└── horizontal_link
└── insertion_joint (Y-axis)
└── needle_link (end-effector)
Joint Definitions
| Joint Name | Type | Axis | Parent Link | Child Link | Range (m) |
|---|---|---|---|---|---|
| vertical_joint | prismatic | Z (0,0,1) | base_link | vertical_link | ±0.025 |
| horizontal_joint | prismatic | X (1,0,0) | vertical_link | horizontal_link | ±0.03 |
| insertion_joint | prismatic | Y (0,1,0) | horizontal_link | needle_link | 0.000 → 0.115 |
- vertical_joint: Adjusts height of the needle guide above the perineum (Z-axis / P-A)
- horizontal_joint: Aligns the guide laterally (X-axis / L-R)
- insertion_joint: Controls needle insertion depth (Y-axis / I-S), i.e., into the patient
References
- Song SE, Tokuda J, Tuncali K, Tempany CM, Zhang E, Hata N. Development and preliminary evaluation of a motorized needle guide template for MRI-guided targeted prostate biopsy. IEEE Trans Biomed Eng. 2013 Nov;60(11):3019-27. doi: 10.1109/TBME.2013.2240301. Epub 2013 Jan 15. PMID: 23335658; PMCID: PMC3778164.
- Tilak G, Tuncali K, Song SE, Tokuda J, Olubiyi O, Fennessy F, Fedorov A, Penzkofer T, Tempany C, Hata N. 3T MR-guided in-bore transperineal prostate biopsy: A comparison of robotic and manual needle-guidance templates. J Magn Reson Imaging. 2015 Jul;42(1):63-71. doi: 10.1002/jmri.24770. Epub 2014 Sep 27. PMID: 25263213; PMCID: PMC4376663.
- Bernardes MC, Moreira P, Lezcano D, Foley L, Tuncali K, Tempany C, Kim JS, Hata N, Iordachita I, Tokuda J. In Vivo Feasibility Study: Evaluating Autonomous Data-Driven Robotic Needle Trajectory Correction in MRI-Guided Transperineal Procedures. IEEE Robot Autom Lett. 2024 Oct;9(10):8975-8982. doi: 10.1109/lra.2024.3455940. Epub 2024 Sep 6. PMID: 39371576; PMCID: PMC11448709.
| ⬅️ Back to Overview | Next: SmartTemplate Description Package ➡️ | Back to Table of Contents ↩️ |